Gamepad setup
SMACCMPilot quadcopter can be controller via keyboard or a gamepad (such as an Xbox One controller). The quadcopter has to be in GCS Input Mode and the GCS window has to be in focus. Only horizontal control is allowed (i.e. roll/pitch/yaw); the altitude is automatically maintained by the autopilot. GCS operator can also reset the Linux VM on the mission computer for the demo scenario.

Xbox one
We bind the buttons on the gamepad to keys, so any gamepad can be used as long as it is properly mapped. Indeed it is possible to control the quadcopter just with the keyboard, but it is easier with the gamepad.
Upon pressing a key, the GCS sends a command message with a discrete control input to the autopilot, where the GCS commands are blended in with the RC control input. That way the trims are counted in, and the safety pilot has always the authority to override the gamepad.
Key mapping
The keys are mapped in the GCS as:
- W: pitch forward
- S: pitch back
- A: roll left
- D: roll right
- Q: yaw left
- E: yaw right
- T: reset Virtual Machine
Multiple key inputs can be combined, for example you can hold down w and q to yaw left and pitch forward at the same time.
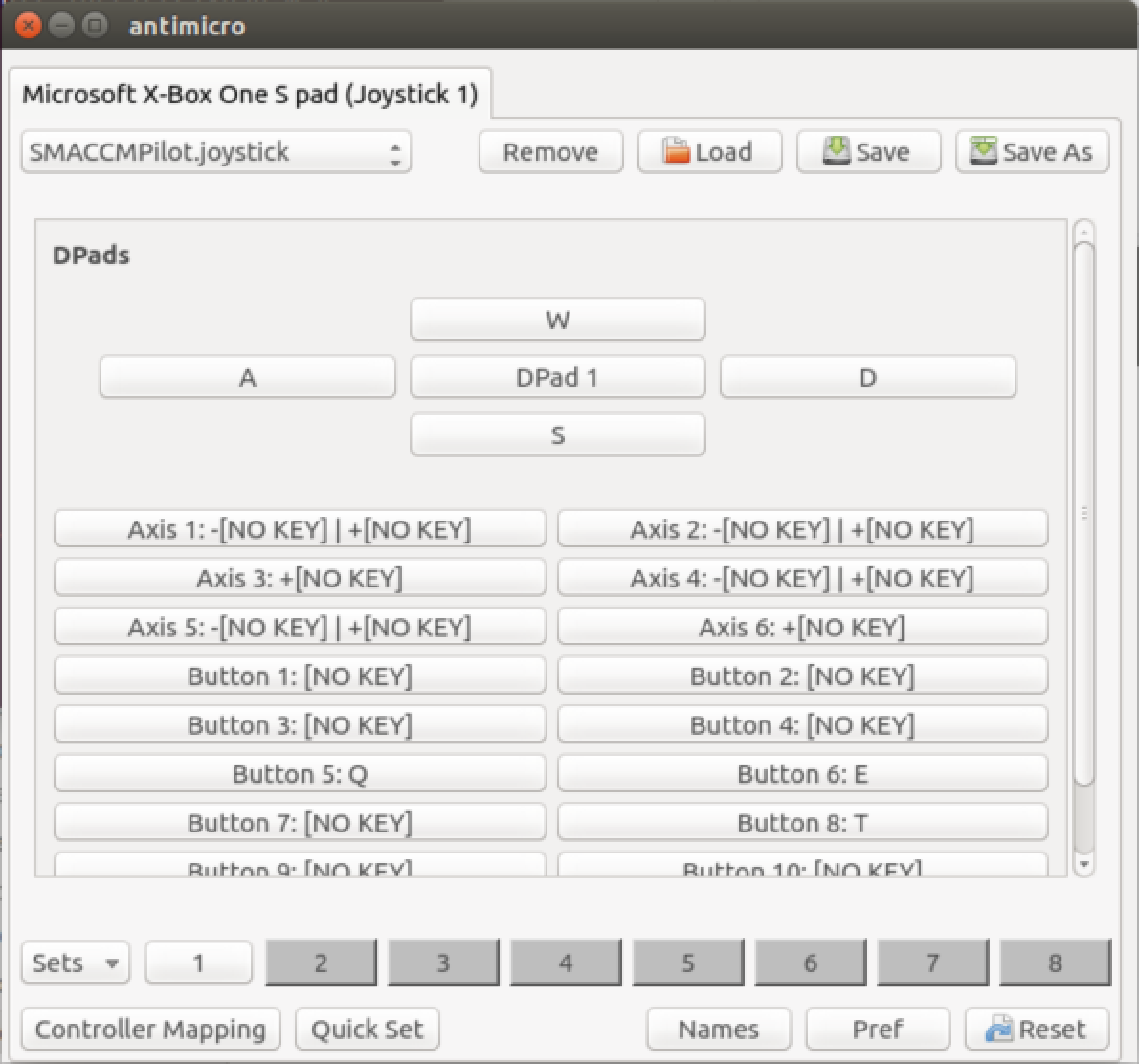
The control scheme we recommend for a gamepad is:
- D-pad: WSAD
- Shoulder buttons: QE
- Start/Menu button: T
Setup
This setup is tested on Ubuntu 14.04 and uses xpad and antimicro for keyboard binding.
$ sudo git clone https://github.com/paroj/xpad.git /usr/src/xpad-0.4
$ sudo dkms install -m xpad -v 0.4
$ sudo modprobe xpad
$ ls /dev/input
$ # should see /dev/input/js0
$ sudo add-apt-repository ppa:mdeguzis/libregeek
$ sudo apt-get update
$ sudo apt-get install antimicroNow start up antimicro and load the following key bindings:
On MacOS, we have had success using Enjoyable to bind keys.
Flight
In order to use gamepad control, the quadcopter has to be in GCS Input mode and the GCS window has to be in focus.