RC Hardware
What is an RC transmitter?
SMACCMPilot may be flown using a Radio Control (RC) transmitter. When we say “RC” we are talking about the general range of hobbyist radio control systems built for flying RC airplanes, helicopters, and the like.
An RC transmitter is a simple and reliable way to manually fly a small quadcopter. In the stabilize flight mode, the SMACCMPilot flight controller essentially serves to make a quadcopter system manually controllable - manual inputs command throttle, pitch angle, roll angle, and yaw rate. We will map these inputs to the four joystick axes of the RC transmitter. We’ll also map the control sequences to arm and disarm the flight controller to use a switch on the RC transmitter as a kill switch, which can turn off the quadcopter motors at any time. This is a critical safety feature.
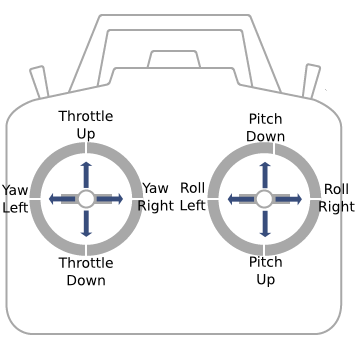
RC Transmitter Joystick Functions
A Safety Controller
SMACCMPilot uses the RC system primarily for safety. Because SMACCMPilot is still experimental and cannot safely fly without human guidance, the RC system provides a pilot a way to disable autonomous flight or the helicopter motors themselves at any time.
We envision that one day, SMACCMPilot will be smart enough to fly & land safety without requiring an RC system for safety. However, for now, we recommend that SMACCMPilot users get comfortable flying the vehicle under stabilize mode, and always have a safety pilot holding the RC transmitter when flying in autonomous or GCS control mode.
Improper operation of any quadcopter can cause injury. Only operate a safe distance away from people, and always have an operator spotting the vehicle and ready to hit the kill switch.
Compatible RC Transmitter and Receivers
RC transmitter systems come in many shapes in sizes. Each transmitter system will also be compatible with some set of RC receivers. We need a transmitter and receiver system with the following features:
- Aircraft or helicopter style transmitter with two joysticks
- Transmitter offers at least 6 channels of control
- Receiver offers PPM output
Mixing information
RC transmitters typically require some amount of setup to configure the mapping of control inputs to output channels. SMACCMPilot requires a radio with at least 6 output channels.
RC transmitters use various schemes to “mix” input sticks and switches to the channel outputs. Fundamentally, each channel is sent from the receiver to the flight controller as a pulse-width modulated (PWM) wave. (Pulse-position modulation, PPM, is a scheme used to multiplex multiple PWM signals serially.) Whether modulated as PWM or PPM, each channel has a width in the time domain, measured in microseconds. RC transmitters generally output a channel with a width ranging from 1000µs to 2000µs. If your RC transmitter uses a different range, it may not work with SMACCMPilot.
SMACCMPilot expects radio channels according to the following scheme:
- Channel 1 controls roll.
- Channel 2 controls pitch.
- Channel 3 controls throttle.
Channel 4 controls yaw.
- Channel 5 selects flight control mode. At this time, SMACCMPilot supports three flight control modes: stabilize, and altitude hold, and GCS control. The user will typically map channel 5 to a 3-position switch on the right side of the controller. Channel 5 pulse widths correspond to the following modes:
- 1000-1250us: GCS mode
- 1250-1750us: altitude hold mode
- 1750-2000us: stabilize mode
Channel 6 is the arming switch. It is designed for safety: if, at any point, the arming switch is released, all of the motors will disarm (no more power will be applied) instantly. The arming switch must be set before the motors are armed via either the RC controller or via a telemetry command. The user will typically map channel 6 to a 2-position switch on the top left of the controller.
Arming via RC controller
The user can arm the motors from the RC controller with the following sequence:
- Channel 6 is set (pulse width greater than 1500us)
- Channel 5 set to stabilize mode (pulse width greater than 1750us)
- Throttle stick is at the low limit (pulse width lower than 1050us)
- Yaw stick is at the high limit - fully to the right (pulse width greater than 1950us)
After this sequence is complete, the motors are armed. When the throttle stick is raised, motors will start spinning.
The vehicle is disarmed at any time by resetting the channel 6 switch.
More information
See our examples page for recommendations and setup instructions for some radio systems we have used.
The PX4 Project wiki has more information about various RC radio systems. Note that the PX4 project software can support more types of radio system input than the SMACCMPilot software. SMACCMPilot only supports PPM input at this time.